
Agent Communication — Reference
This reference maps each of Agentweaver's three agent communication channels to its concrete surfaces: MCP tools and HTTP API endpoints. For the conceptual model and the reasoning behind it, read the Agent Communication deep dive.
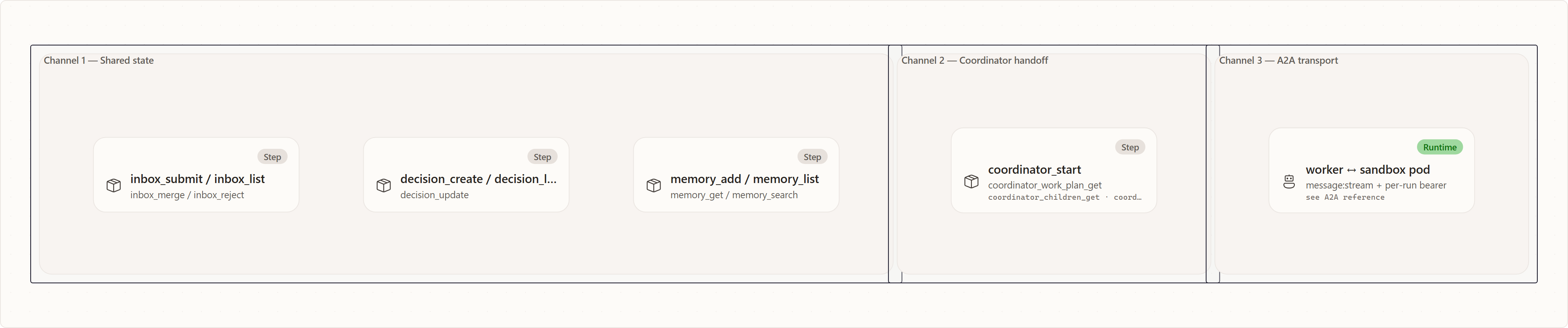
The three channels are:
- Indirect / shared-state coordination — the decisions ledger and cross-agent memory (the team's shared brain).
- Coordinator-mediated handoffs — the WorkPlan / subtask DAG and child-run dispatch.
- Direct transport (A2A) — the worker↔sandbox-pod execution transport for a single agent turn.
Precision note. Channels 1 and 2 are how the team coordinates. Channel 3 is how a single agent turn is executed. A2A is not a way for two agents to chat. Do not map agent-to-agent coordination onto the A2A surfaces. The A2A turn surface is
RemoteAgentProxy → Authorization: Bearer {per-run token} → AgentHost message:stream; each AgentHost pod accepts only its own run's token.
Channel 1 — Shared-state coordination
Agents coordinate indirectly by reading the project's decisions and memory at turn start (and mid-run) and by writing proposals back into the decision inbox. The conceptual model is in the Memory & Decisions deep dive; the full tool catalog is in the MCP reference and the API reference. The surfaces below are the ones that constitute cross-agent communication.
Decision inbox — propose, list, promote, reject
The inbox is the durable drop-box in front of the canonical ledger. Agents submit proposals here; reviewers and the Scribe merge or reject them.
| MCP tool | API endpoint | Purpose |
|---|---|---|
inbox_submit | POST /api/projects/{id}/decisions/inbox | Submit a decision or learning proposal (slug-keyed, idempotent) |
inbox_list | GET /api/projects/{id}/decisions/inbox | List entries (?agent=, ?type=, ?status=; default pending) |
inbox_merge | POST /api/projects/{id}/decisions/inbox/{entryId}/merge | Promote a pending entry into a canonical decision |
| (merge alias) | POST /api/projects/{id}/decisions/inbox/{entryId}/promote | Alias for merge/promote |
inbox_reject | POST /api/projects/{id}/decisions/inbox/{entryId}/reject | Reject a pending entry (retained for audit) |
inbox_submit parameters: project_id, agent_name, slug (unique, for idempotency), type (learning · pattern · update · architectural · scope · process · technical), title, content, optional rationale. Re-submitting the same agent_name + slug while still pending updates the entry in place; a different agent reusing the same slug is de-collided into a new entry. See the slug de-collision logic in the Memory & Decisions deep dive.
Decisions ledger — create, list, update
Promoted entries become canonical decisions. The coordinator and Scribe paths may also create decisions directly, and decisions can be superseded or archived.
| MCP tool | API endpoint | Purpose |
|---|---|---|
decision_create | POST /api/projects/{id}/decisions | Create a decision directly (coordinator / Scribe path) |
decision_list | GET /api/projects/{id}/decisions | List decisions (?type=, ?agent=) |
| (get one) | GET /api/projects/{id}/decisions/{decisionId} | Get a single decision |
decision_update | PUT /api/projects/{id}/decisions/{decisionId} | Update status/content; set superseded_by_id |
decision_update accepts status (active · superseded · archived), new content, and superseded_by_id. Active architectural and scope decisions are the highest-priority context injected into every agent — they are the team boundaries every agent reads. See the Memory reference for how they are compiled into Layer 1 of the prompt.
Cross-agent memory — record, list, get, search
Memory is reusable context. An agent's own memory is agent-scoped, but memory_search reads across all agents on the project, and memory tagged cross-team surfaces in other agents' compiled context. This is the read side of indirect coordination.
| MCP tool | API endpoint | Purpose |
|---|---|---|
memory_add | POST /api/projects/{id}/agents/{name}/memory | Add a memory entry for an agent |
memory_list | GET /api/projects/{id}/agents/{name}/memory | List one agent's memories (?type=, ?importance=) |
memory_get | GET /api/projects/{id}/agents/{name}/memory/{memId} | Get a single memory entry |
memory_search | GET /api/projects/{id}/memory | Cross-agent search across the whole project (?type=, ?tags=) |
memory_add parameters: project_id, agent_name, type (learning · pattern · core_context · update), content, optional importance (low · medium · high) and comma-separated tags. memory_search parameters: project_id, optional type, optional tags (comma-separated, OR semantics) — and it returns entries from all agents.
GET /api/projects/{id}/memoryis the cross-agent search surface. It is the endpoint behindmemory_searchand the one place a caller reads the team's accumulated memory without naming a specific agent.
Curation — the Scribe and export
After a run, the Scribe lists pending inbox entries, merges low-risk learning / pattern / update entries, updates the session, and exports DB state to files. Architectural and scope entries are left for review. Export and import bridge the DB to the .squad/ and .agentweaver/context/ mirrors:
| API endpoint | Purpose |
|---|---|
POST /api/projects/{id}/memory/export | Export DB memory → .squad/ + .agentweaver/context/ |
POST /api/projects/{id}/memory/import | Import .squad/decisions/inbox/*.md → DB |
The Scribe's role and the four-layer context build are documented in the Memory reference.
Channel 2 — Coordinator-mediated handoffs
The coordinator decomposes a goal into a WorkPlan / subtask DAG, dispatches child runs, observes them, and steers them. Children report results up to the coordinator; they never message each other. These tools are thin proxies over the Coordinator endpoints — see the Coordinator reference, the MCP reference, and the API table in the API reference.
Start and intent
| MCP tool | API endpoint | Purpose |
|---|---|---|
coordinator_start | POST /api/projects/{id}/orchestrations | Start a coordinator orchestration from a plain-language goal |
coordinator_outcome_spec_get | GET /api/runs/{id}/outcome-spec | Read the persisted OutcomeSpec (intent contract) |
coordinator_outcome_spec_confirm | POST /api/runs/{id}/outcome-spec/confirm | Confirm the spec, resuming past the gate |
coordinator_outcome_spec_revise | POST /api/runs/{id}/outcome-spec/revise | Re-draft the spec from feedback |
No subagent work is dispatched until the OutcomeSpec is confirmed.
Plan, children, and dispatch
| MCP tool | API endpoint | Purpose |
|---|---|---|
coordinator_work_plan_get | GET /api/runs/{id}/work-plan | The subtask DAG: subtasks (with assignedAgent, phase, isolation, status, childRunId) and dependencies edges |
coordinator_children_get | GET /api/runs/{id}/children | Dispatched child runs, each with subtaskId, childRunId, subtaskStatus, assignedAgent, childRunStatus, worktreeBranch |
orchestration_topology | GET /api/runs/{id}/work-plan + GET /api/runs/{id}/children | One-shot { coordinatorRunId, workPlan, children } snapshot |
Each child run carries a ParentRunId and a SubtaskId. Children stop at the assemble-ready boundary — they do not run review, merge, or Scribe; the coordinator assembles. The full dispatch and assembly model is in Coordinator Internals.
Steering — coordinator-mediated, not peer-to-peer
Steering is how an operator redirects in-flight work. It always goes through the coordinator, which relays to the targeted child — siblings never steer each other.
| MCP tool | API endpoint | Purpose |
|---|---|---|
coordinator_steer | POST /api/runs/{id}/steer | stop / redirect / amend a child; omit target_child_run_id to broadcast to all active children |
coordinator_steer parameters: run_id, kind (stop · redirect · amend), instruction, optional target_child_run_id. A stop cancels the targeted turn immediately; redirect / amend apply at the child's next turn boundary. Directive progress streams as coordinator.steering (pending → queued → relayed → applied).
Observing the topology
A coordinator run is an ordinary run, so there is no separate streaming tool — point run_watch at the coordinator run_id.
| MCP tool | API endpoint | Purpose |
|---|---|---|
run_watch | GET /api/runs/{id}/stream | Live stream; carries coordinator.work_plan, coordinator.topology, subtask.*, and coordinator.steering events |
The subtask.* family (subtask.dispatched, subtask.running, subtask.assemble_ready, subtask.completed, subtask.failed) is how results and status flow up to the coordinator view. Child clarifying questions and tool approvals are re-emitted on this stream and routed back to the originating child — never sideways. See Coordinator Internals.
Channel 3 — Direct transport (A2A)
A2A (Agent2Agent) is the wire transport that remotes a single agent turn from the worker to an AgentHost inside a sandbox pod. It is execution transport, not agent-to-agent chat: the orchestration graph stays in the worker, and A2A carries only the leaf agent turn's output stream across the boundary. On the worker the leaf is a RemoteAgentProxy (an A2AAgent over A2A HTTP+JSON); the pod hosts an A2ATurnBridgeAgent (agentweaver-pod) wrapping its CopilotAIAgent, exposed at POST /a2a/agent/v1/message:stream and GET /a2a/agent/v1/card.
A2A has its own dedicated surfaces and is documented separately:
- A2A bridge deep dive — the conceptual transport model (worker tier, sandbox-pod AgentHost, remote agent proxy).
- A2A reference — the concrete transport endpoints and wiring.
- Distributed execution spec §4 — the rationale for A2A as the sole worker→AgentHost wire transport.
Because A2A operates below team coordination, none of the Channel 1 or Channel 2 surfaces change when a turn runs in a remote pod versus locally. The shared-state tools and coordinator tools are identical either way.
Channel-to-surface summary
| Concern | Channel | MCP tools | Key endpoints |
|---|---|---|---|
| Propose / promote boundaries | 1 | inbox_submit, inbox_list, inbox_merge, inbox_reject | /api/projects/{id}/decisions/inbox* |
| Canonical decisions | 1 | decision_create, decision_list, decision_update | /api/projects/{id}/decisions* |
| Cross-agent memory | 1 | memory_add, memory_list, memory_get, memory_search | /api/projects/{id}/agents/{name}/memory*, GET /api/projects/{id}/memory |
| Decompose & dispatch | 2 | coordinator_start, coordinator_work_plan_get, coordinator_children_get, orchestration_topology | /api/projects/{id}/orchestrations, /api/runs/{id}/work-plan, /api/runs/{id}/children |
| Steer & observe | 2 | coordinator_steer, run_watch | /api/runs/{id}/steer, /api/runs/{id}/stream |
| Execute one agent turn | 3 | see A2A reference | see A2A reference |
Related reading
- Agent Communication deep dive — the conceptual model and why indirect coordination beats direct chat.
- Agent Communication experience — what these surfaces look like to a user.
- Memory reference and Memory & Decisions deep dive.
- Coordinator reference, MCP reference, and API reference.
- A2A bridge deep dive and A2A reference.