
Agent Communication — Conceptual Deep Dive
Purpose and mental model
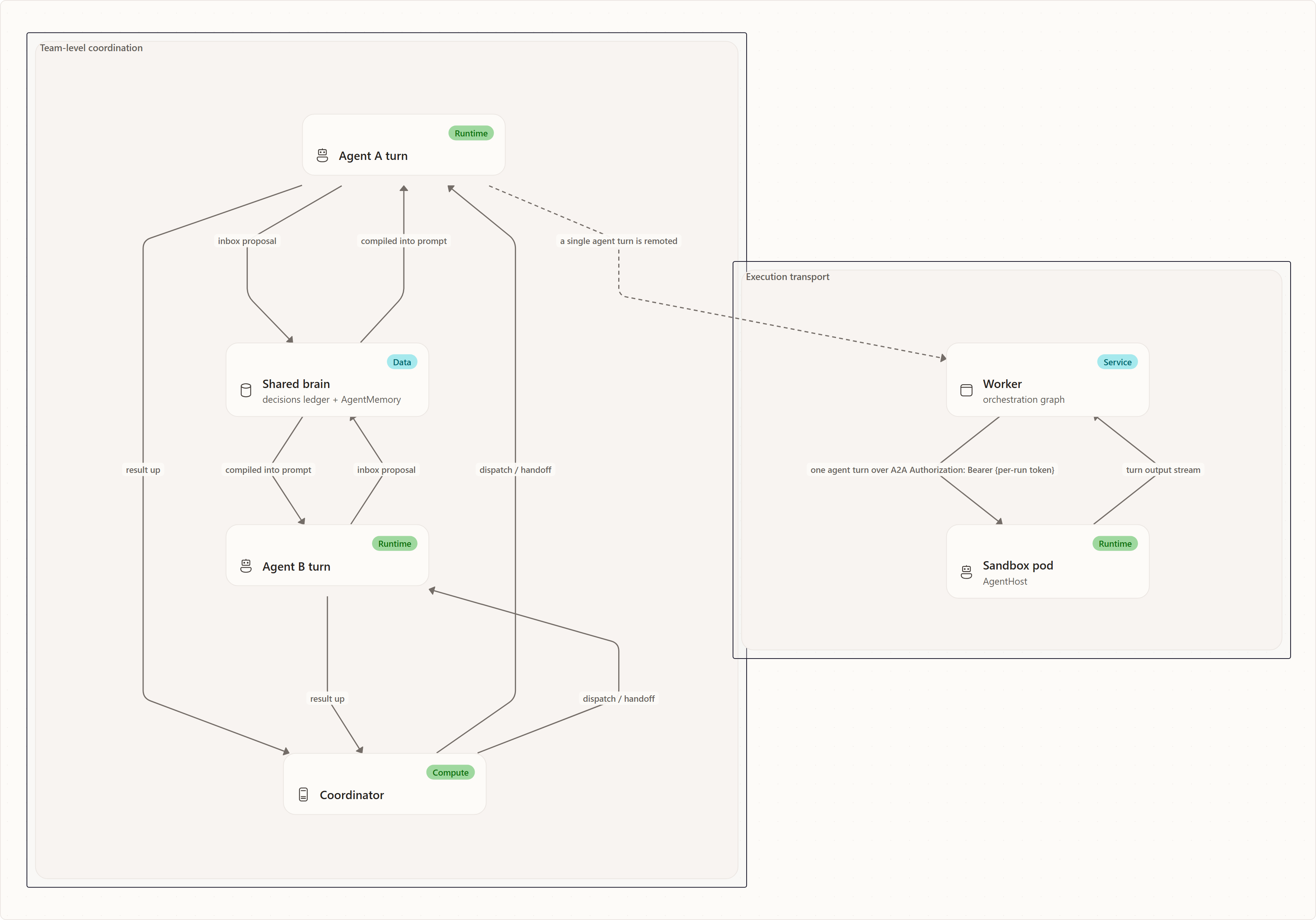
A team in Agentweaver is many agents working toward one outcome, but the agents never sit in a chat room talking to each other. There is no free-form agent-to-agent conversation, no message bus where one specialist pings another, no negotiation loop. Coordination is deliberately indirect and structured.
The mental model is a shared workshop, not a group chat:
- There is a shared brain every agent reads from and writes to — the decisions ledger and the cross-agent memory.
- There is a foreman — the coordinator — who breaks a goal into bounded jobs, hands each to one agent, and assembles the pieces back together.
- There is a delivery mechanism that carries a single agent's turn to wherever it physically runs — the A2A transport between the worker and a sandbox pod.
These are three different channels with three different jobs. The first two are how the team coordinates. The third is how a single agent turn is executed. Keeping them distinct is the most important idea in this document: A2A is execution transport, not a way for two agents to talk.
The three channels
| Channel | What it coordinates | Direction | Carrier |
|---|---|---|---|
| Indirect / shared-state | The whole team's accepted truth and learnings | Read at spawn and mid-run; write via inbox | Decisions ledger + cross-agent memory |
| Coordinator-mediated handoff | One goal decomposed into bounded subtasks | Coordinator → children; results flow up | WorkPlan / subtask DAG |
| Direct transport (A2A) | A single agent turn's execution | Worker ↔ sandbox pod | claim warm AgentHost pod, one-time /configure, then A2A message:stream with per-run bearer auth |
The rest of this document explains each channel, then explains why the team coordinates through a shared blackboard instead of direct chat.
Channel A — Indirect coordination through shared state
This is the primary way agents influence each other, and it borrows the classic blackboard pattern: contributors never address one another directly; they read from and write to a shared, durable surface, and a curator keeps it coherent. In Agentweaver that surface is the decisions ledger and cross-agent memory, and the curator is the Scribe.
The shared brain has two parts
- Decisions are accepted team boundaries — architectural and scope rules the whole team must respect. They are the highest-authority artifact.
- Memory is reusable context — core facts, learnings, and patterns. Memory informs an agent; decisions constrain the team. Memory never overrides a decision.
Both are scoped to a project, and both are described in depth in the Memory & Decisions deep dive and the Memory reference.
Reading: agents start from, and stay synced with, the shared state
Before every turn, the context compiler assembles a structured block from four priority-ordered layers — decisions first, then core context, then high-importance learnings and patterns (including anything tagged cross-team), then the current session — and injects it into the agent's prompt. An agent therefore begins each turn already knowing the team's accepted boundaries and the relevant accumulated knowledge, without anyone having to tell it. The full layering logic lives in the Memory reference.
Reads are not limited to spawn time. Agents can also pull the latest decisions and memory mid-run, so a long-running agent picks up boundaries that were promoted after it started rather than working from a stale snapshot. This keeps the blackboard live: a constraint accepted while an agent is mid-flight becomes visible to it on its next read.
Writing: agents propose, they do not publish
Agents do not write team law directly. When an agent discovers something worth keeping — a learning, a reusable pattern, a correction, or a candidate boundary — it drops a proposal into the decision inbox. The inbox is a durable, reviewable drop-box in front of the canonical ledger. Proposing is not the same as deciding.
Curating: the Scribe merges, conflict-free
After a run completes, the Scribe step reviews the inbox and promotes accepted entries into the ledger or memory, leaving an audit trail behind. Lower -risk learnings, patterns, and updates can auto-merge; higher-impact architectural and scope proposals are left for coordinator or human review. Rejected entries are retained, not deleted, so the record explains not just what the team accepted but what it declined.

Because merges add facts and change status rather than rewriting history, independent agents can contribute concurrently without clobbering each other. Two agents proposing under the same natural name are de-collided into two distinct entries; a rejection is a status transition, not a delete; a promotion links the source proposal to the decision it created. The Memory & Decisions deep dive calls this the conflict-free merge model, and it is exactly what makes indirect coordination safe at scale: no agent has to lock the blackboard to write to it.
Coordinator children read decisions only
A coordinator child run is a focused worker with a tight charter. It receives the team's active architectural and scope decisions plus its charter — but not the full memory stack, which would duplicate its charter and reference paths absent from its worktree. Decisions are the non-negotiable boundaries, so they are the one part of the shared brain that always reaches the agents doing the actual work. This carve-out is detailed in the Memory reference.
Channel B — Coordinator-mediated handoffs
The second channel is how a single goal becomes parallel work without any agent having to coordinate with a peer. The coordinator sits between the human goal and the workers and owns all cross-agent structure.
Decompose: goal → OutcomeSpec → WorkPlan DAG
The coordinator first drafts an OutcomeSpec — the intent contract — capturing the goal, desired outcome, scope, and assumptions, and suspends at a confirmation gate. Nothing is dispatched until the spec is confirmed. Once confirmed, it produces a WorkPlan: the execution contract. The WorkPlan decomposes the goal into an outcome-complete set of independently dispatchable subtasks — one for every lifecycle stage the outcome implies, not the fewest that compile — each owned by one agent, each bounded, ordered by explicit dependency edges that form a DAG. The full decomposition logic is in the Orchestration deep dive and Coordinator Internals.

Dispatch: children run independently, in parallel where safe
For each subtask whose dependencies are satisfied — the ready frontier — the coordinator dispatches a child run, tagged with a ParentRunId and its SubtaskId. Independent subtasks run in parallel; dependent ones are serialized behind their prerequisites. The DAG makes this parallelism deterministic: the same plan advances the same way every time.
Handoff: assemble-ready, not merge-independent
A child run is intentionally trimmed. It does its agent work and child-level safety checks, then stops at the assemble-ready boundary. It does not run human review, merge, or Scribe — those are the parent's job. "Assemble-ready" means: my fragment is finished and ready for the coordinator to integrate, not my work is done and shipped. Children are fragments of the parent outcome, so they must not merge independently. The coordinator collects the assemble-ready pieces, integrates them in dependency order, runs collective review, and records the combined result.
Children report up, never sideways
This is the structural rule that replaces peer chat. A child never messages another child. When a child needs a clarifying answer or a tool approval, the request is re-emitted on the coordinator's stream; the human (or, under Autopilot, the coordinator) answers, and the answer is routed back to the requesting child. The coordinator's view is the inbox; the child remains the owner of its own request. Information flows up to the coordinator and back down to the originating child — never laterally between siblings. Steering works the same way: an operator steers through the coordinator (stop, redirect, amend), which relays direction to the targeted child at its next turn boundary. The full handoff and steering model is in the Coordinator Internals deep dive.
Channel C — Direct transport (A2A)
The third channel is the one most easily confused with "agents talking," so be precise: A2A (Agent2Agent) is the wire transport that remotes a single agent turn. It is execution plumbing, not a coordination protocol.
When an agent turn runs in a distributed deployment, the worker keeps the entire orchestration graph — the workflow, the human-in-the-loop gates, the resume logic — in process. Only the leaf agent turn is sent over A2A to an AgentHost running inside a sandbox pod, which executes the model turn and its tools, then streams the turn's output back. On the worker side the leaf is a RemoteAgentProxy (an A2AAgent over the A2A HTTP+JSON transport); the pod hosts an A2ATurnBridgeAgent (MAF name agentweaver-pod) wrapping its singleton CopilotAIAgent. RemoteWorkflowAgentFactory remotes all four workflow roles this way. The orchestration graph never crosses the boundary; A2A carries one turn's chat/output stream and nothing more. A2A is the sole worker→AgentHost wire transport for that seam.

Why this is not Channel A or B:
- It moves one turn of one agent to where it physically executes. It does not let two agents converse.
- The thing on each end of the A2A link is a worker and a pod, not two collaborating agents.
- Team coordination — shared decisions, memory, handoffs — happens entirely in the worker tier, above this transport, regardless of whether a turn runs locally or in a remote pod.
In other words, A2A could carry every agent turn in the system and the team would still coordinate the same way, through the blackboard and the coordinator. The conceptual model of the transport lives in the A2A bridge deep dive; its surfaces are in the A2A reference. For the distributed execution rationale, see the distributed-execution spec.
Why indirect coordination instead of direct chat
The team channels deliberately avoid agent-to-agent conversation. The reasons are the heart of the design.
Auditability
Every coordination event is a durable artifact. A proposal sits in the inbox; a promotion creates a linked decision; a rejection is retained; a handoff is a WorkPlan edge; an assembled outcome carries a collective review. You can answer "why did the team do this?" by reading state, not by replaying a transcript. Free-form chat leaves only an unstructured log that is hard to audit and easy to contradict.
Determinism
A subtask DAG advances the same way every time: ready subtasks dispatch, results flow up, the coordinator assembles. There is no emergent, order-dependent back-and-forth between agents whose outcome depends on who spoke first. Determinism is what makes orchestration reproducible and recoverable from persisted state rather than from chat history.
Conflict-free merge
The blackboard merges by adding facts and changing status, never by rewriting history. Independent agents contribute concurrently — de-collided proposals, status-transition rejections, link-preserving promotions — without locking or overwriting each other. A chat model has no equivalent: two agents asserting conflicting things in a conversation produce a contradiction someone must resolve by hand.
No chat-loop nondeterminism
Direct agent-to-agent chat invites loops: A asks B, B asks A, neither converges, tokens burn, and the outcome depends on arbitrary turn ordering. Routing all cross-agent questions up to the coordinator removes the loop entirely. There is exactly one place a question can be answered, exactly one owner per request, and a bounded, observable resolution path.
One authority layer
Memory informs; decisions govern; only promoted decisions bind the team. Because agents propose rather than publish, no single agent's transient opinion becomes team policy by being asserted loudly in a conversation. The review buffer is the price of keeping policy deliberate.
Putting it together
The three channels never blur:
- The shared brain (Channel A) is how knowledge and boundaries reach every agent and how agents feed knowledge back — indirectly, durably, conflict-free.
- The coordinator (Channel B) is how one goal becomes many bounded jobs and how their results come back together — top-down handoff, bottom-up results.
- A2A (Channel C) is how a single agent turn is physically executed somewhere else — transport, not conversation.
If you remember one distinction, remember this: agent coordination is the team-level blackboard plus coordinator handoffs; A2A is a single agent turn remoted to a pod. They solve different problems and must not be conflated.
Related reading
- Memory & Decisions deep dive — the shared ledger, inbox→promotion, and conflict-free merge.
- Memory reference — four-layer context build and the Scribe's role.
- Orchestration deep dive and Coordinator Internals — WorkPlan/subtask DAG, dispatch, and assemble-ready handoff.
- A2A bridge deep dive and A2A reference — the worker↔pod execution transport.
- Agent Communication reference — the concrete MCP tools and API endpoints behind each channel.
- Agent Communication experience — what coordination looks like to a user watching a team work.